1. 定义
在文章开头对广义B样条多项式函数做一个简要介绍。广义的B样条多项式是由一个函数族定义的,这个函数族主要由3个基本要素确定:1,一组递增的结点向量;2,一个能有“只在局部起影响”的第0阶函数;3,一个从n到n+1阶递推的多项式变化公式。
1.1 广义 B 样条多项式的 3 要素
首先是一组递增的结点向量[t0,t1,t2,...tk],这是一组大于0的单调递增的有理数,相邻两个数可以相等。这里用符号Nj i (t)来定义第j阶的第i个关于t的多项式,那么所谓的第0阶函数族就可以用N0 0 ,N0 1 ,...N0 n ,N0 n+1 来表示。B样条多项式的模型设定为Nj i (t)函数只在[ti ,ti+j+1 )区间起作用,那么对于N0 i 而言,将仅仅在t属于[ti ,ti+1 )区间时起作用,等于1.确切的说是函数N0 i (t)在[ti ,ti+1 )区间取值为1,在这个区间以外都为0。接下来再定义一个从j-1阶到j阶的递推:Nj i = (t-ti )*Nj -1 i /(ti+j -ti )+ (ti+j+1 – t)Nj -1 i +1 /(tj+i+1– ti+1 )。这就是由Cox和DeBoor提出的著名的B样条多项式递推公式。
在这个递推公式和N0 i (t)函数的定义下,可以顺势给出函数N1 i (t)的公式
N1 i (t)= (t-ti )N0 i (t)/(ti+1 -ti )+ (ti+1 -t)N0 i+1 (t)/(ti+2 -ti+1 )
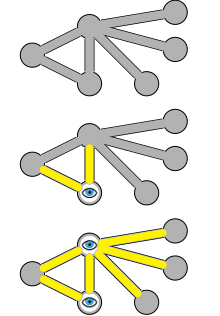
在结点向量不存在相邻结点相等的情况下N1 i (t)的函数图像如下:
图1
图1很清楚的描绘出N1 i (t)函数族在结点向量中的作用方式。每个1阶的函数也都只在局部范围起作用,而且比0阶作用范围多了一段。每两个相邻的函数互相由一段作用范围发送重叠。除了首尾两端的结点段以外,其他的每个结点段都有2个函数起作用。这个性质可以推广到2阶,3阶到n阶。
1.2 基于广义 B 样条多项式的 B 样条曲线
基于广义B样条的多项式创建B样条曲线的时候,为了使B样条曲线的开头与结尾的性质于由Riesenfeld多项式确定的均匀B样条曲线所保持一致性,做了一个这样的设定:由结点向量[t0,t1,t2,...tk]确定的广义B样条多项式的作用范围对于j阶曲线而言是从tj 开始到tk-j 结束。区间[tj ,tk-j )被称为j阶B样条曲线的参数域。k和j的大小关系必须保证这个参数域的定义有效,也就是说k>2j。参数域的规定,保证了对于j阶B样条曲线,在每一小段[ti ,ti+1 )参数区间都有j+1个点起作用(否则在曲线的首尾两端部分将只有不足j+1个点起作用,将无法保证曲线的连续性)。
上面已经确定了多项式Nj i (t)和参数域,下面给出B样条的参数点。结点向量[t0,t1,t2,...tk]对于j阶B样条曲线而言,将伴随着k-j个参数点的定义。因为对于j阶曲线而言,每个参数点在结点向量中的作用域都是j+1个小段。那么每个参数点的作用域为[t0 ,tj+1 ),[t1 ,tj+2 ),[t2 ,tj+3 )... [tk-j-1 ,tk ],一起正好k-j个作用域。设这些参数点为P0 ,P1 ,P2 ,...Pk-j-1 ,j阶的B样条曲线的定义公式为:
从这个公式还可以看出,因为k>2j所以imax >=j,参数域的规定使得这个公式中的i能够满足至少从0到j的完整性。值的一提的是,如果结点向量都是均匀分布(ti+1 - ti 等于常数)或者结点向量除了首尾j+1个结点相等外其他都是均匀分布,这个B样条曲线将退化成为均匀B样条曲线。如果结点向量数量刚刚等于2j+2(即k=2j+1>2j),而且前j+1个结点都等于0,后j+1个结点都等于1,那么这个B样条曲线将退化成Bezier曲线(中文译名有的叫贝塞尔曲线,有的叫贝济埃曲线,还有的叫贝兹曲线,总之它姓贝,所以也叫贝氏曲线)。最后,如果给每个控制点都再增加一个权重[p0 ,p1 ,...pk-j-1 ]的定义,让Nj i (t)函数由多项式变成有理式:
这就是著名的非均匀有理B样条曲线的定义公式。
2 结点向量的结点间隔对曲线的影响
在定义了B样条曲线后,我们再重新按照控制点Pi 的作用范围来对1阶曲线的结点与多项式图做一个分析。
图2
图2清晰的给出了1阶曲线中每个点在结点区间中的作用范围。按照前文参数域的定义,1阶曲线的参数域从t1开始,因此,P0也是从t1开始起作用。每一段结点之间有两个控制点对其起作用。在1阶曲线中,结点间隔影响N1 i (t)函数在每一段结点间的斜率,但这个斜率并不影响B样条曲线的形状。1阶B样条曲线是个多段线,无论t1到t2之间的间隔怎样变化,它都是从P0到P1之间的一条直线。但我们能隐约感觉得到,这个规律在更高的阶次曲线上就不成立了。事实上,单从B样条多项式来看,结点间隔所占一个多项式变化过程中的结点间隔的比例更像是对一个函数曲线在不同区间进行不同比例的“拉伸”和“压缩”。例如从图2中可以看出,N1 1 (t)在[t1,t3]之间,[t1,t2]所占[t1,t3]的比例,描述了P1控制点在[t1,t2]区间的控制能力所占P1对整个控制领域的控制能力的权重。例如,t2-t1> t3-t2的意思是,P1把更多的控制能力放在了与P0的协同控制上而把相对更少的控制能力放在了与P2的协同上。
在1阶B样条曲线上,我们观察不到这种“控制能力”对曲线的影响,下面我们将观察它对2阶B样条曲线的影响。
我们考察两个2阶B样条曲线,它们的结点向量分别是[0,0, 0, 0.5, 1, 1, 1]和[0,0, 0, 0.9, 1, 1, 1]。这两条B样条曲线有着共同的控制点P0(0,0,0);P1(10,0,0);P2(10,10,0); P3(0,10,0)。接下来首先分别计算这两个结点向量所产生的B样条多项式。
首先,对于前者(下面的计算过程涉及到了对于重复点的一个约定,即在B样条多项式间,对重复点区间的单项做省略处理。):
对于后者:
分别做出两种情况的B样条曲线的控制点影响坐标图如下:
对于前者:
图3
对于后者:
图4
对比图3和图4中的[0,0.5)和[0,0.9)区间。P0,P1,P2的作用函数曲线变得更缓更长,对于[0,1]区间,P0,P1,P2在后一种情况中,对整个曲线的驾驭权重增加了,这直接影响了曲线的形状。前一种情况在t=0.5时,和后一种情况的t=0.9时P0,P1,P2的重心系数明显发生了变化(P0没有变化,P1减弱了,P2加强了)。
如果一个j阶B样条曲线(j>1)的某个结点区间[tm ,tm+1 )相对于[tm-j ,tm+j ]长度增加(tm 在参数域中),这个区间对应起作用的控制点为Pv ,Pv+1 ,...Pv+j 这个区间的以下规律可以按曲线的阶次推广:
1.Pv ,Pv+1 ,...Pv+j 所控制的曲线段长度相对增加。
2.Pv ,Pv+1 ,...Pv+j 所控制的曲线段弯曲变化率降低。
3.对于Pv+h 点,如果h<= j/2, 如果[tm ,tm+1 )的长度相对于[tm-j+h,tm+h)区间增加则点Pv+h 的控制权重则减少,反之则增加。如果h> j/2, 如果[tm ,tm+1 )的长度相对于[tm-j+h,tm+h)区间增加则点Pv+h 的控制权重则增加,反之则减少。
如果结点区间[tm ,tm+1 )相对于长度减少,则上诉1,2结论也取反。例如,图3到图4的变化,会导致B样条曲线向P2,及其相邻的点靠拢,顺序上离P2越远的点所发挥的控制力量都减弱。
下面给出实际绘制出来的B样条曲线,可以验证上述结论的正确性:
这两个图即是上文所讨论的结点发生变化的两个2阶B样条曲线,很明显右图中P2的控制权重增加了。
再看看多一个控制点的情况:
对比这两幅图中的样条曲线
1.结点在[t3,t4)区间长度相对减少,根据结论3,这会导致P0,P1权重增加,P2权重减少。
2.结点在[t4,t5)区间长度相对增加,根据结论3,这会导致P2权重减少,P1,P3权重增加。
3.结点在[t5,t6)区间长度相对增加,根据结论3,这会导致P3权重增加,P2,P4权重减少。
在nurbs曲线中,相比于控制点的权重值,结点之间的间隔大小影响的是一段控制点对曲线操控能力的相对权重。例如,在一段曲线中,我们希望P1,P2,P3这3个控制点相比于其他部分更起主导作用,而且控制得更细致一些,则应该在这3个点所对应的结点部分加长一些。值的注意的是,这样做,既增加了这段曲线的控制能力而又没有增加控制点和曲线的阶数,唯一损失的是另外一部分相对减少了的结点长度。